本文将手把手带你实现实时人脸检测,并将完整流程开源。打通从数据采集、模型训练、量化转换,到集成部署的每一个环节。我们已为你准备好了数据集、训练代码、转换工具链与RT-Thread工程。只需跟随步骤,即可体验在1 GHz Arm Cortex-M85 MCU上部署AI模型。(公众号后台回复RA8P1,加入交流群)
目录
应用效果预览
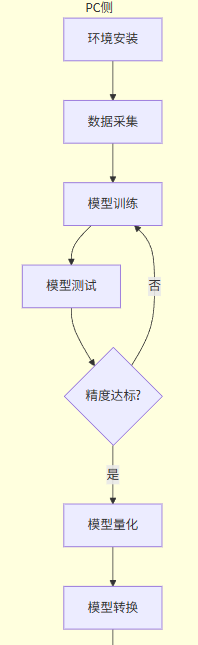
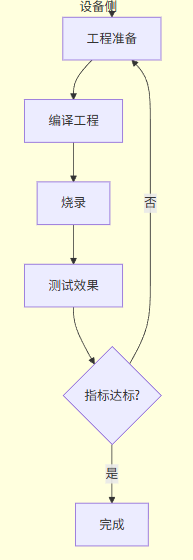
流程图
环境准备
训练模型
ai模型转换
ai模型部署
网盘资源及培训视频
1 应用效果预览

2 流程图
提示:可以上下滑动
3 环境准备
3.1 硬件清单
开发板:RA8P1开发板(Titan Board)。
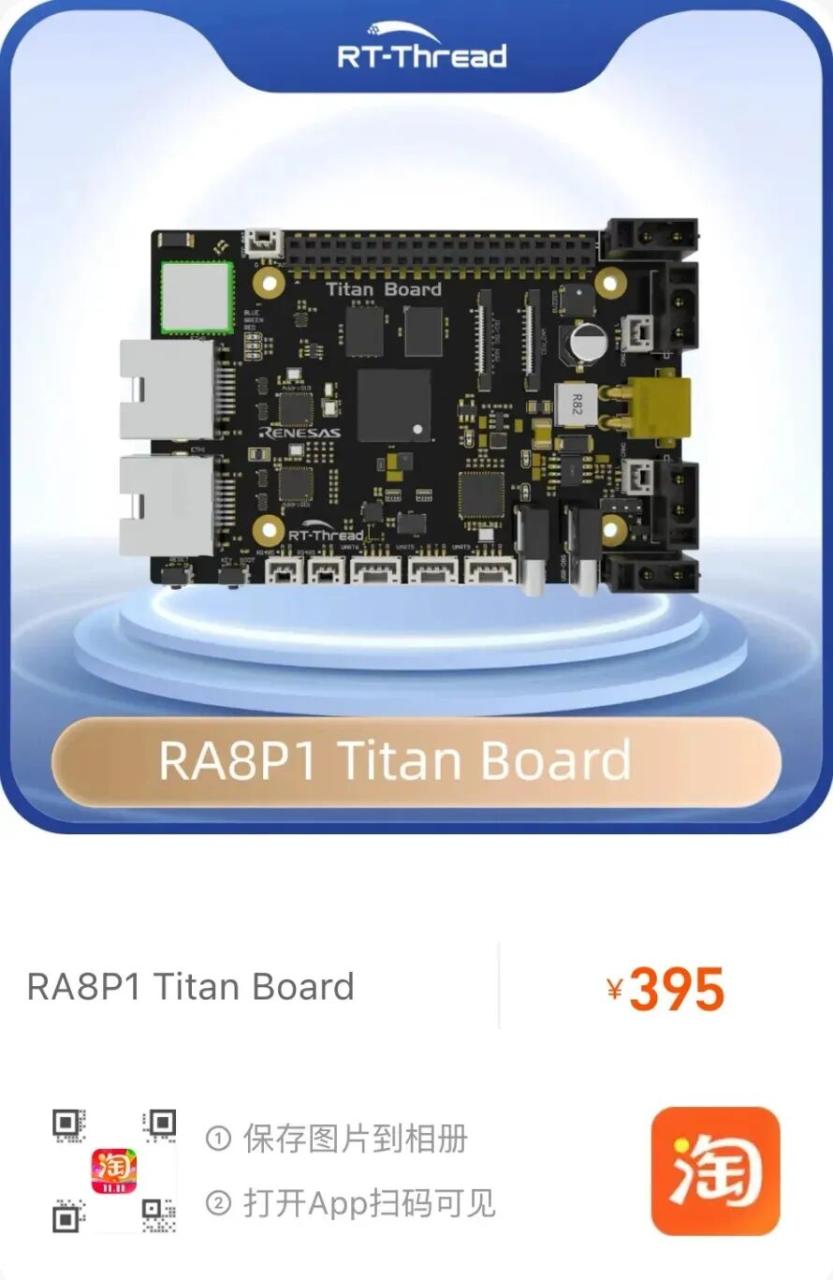
或复制链接购买:https://item.taobao.com/item.htm?ft=t&id=987791181903
传感器/外设:RGB565屏幕和摄像头
3.2 软件与⼯具
RT-Thread Studio
Python 3.9–3.11,pip包:pytorch等ai库
Yolo-Fastest
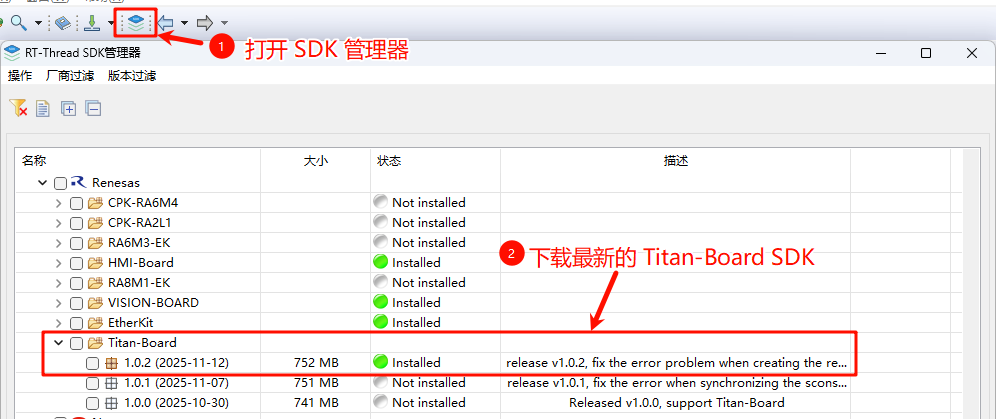
3.3 RT-Thread Studio
在 RT-Thread Studio 中下载 Titan-Board SDK 及相关依赖(下载Titan-Board SDK 时,其他依赖会自动下载)。
网盘中提供了下载好的 Titan-Board SDK,可以通过导入的方式安装 SDK。
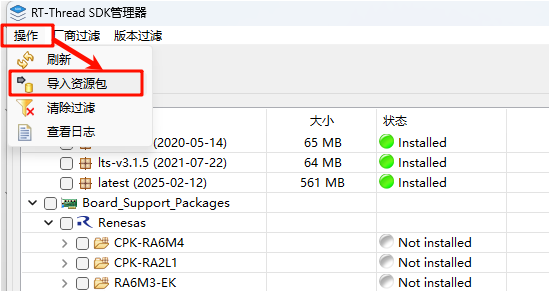
选择 SDK 压缩包。
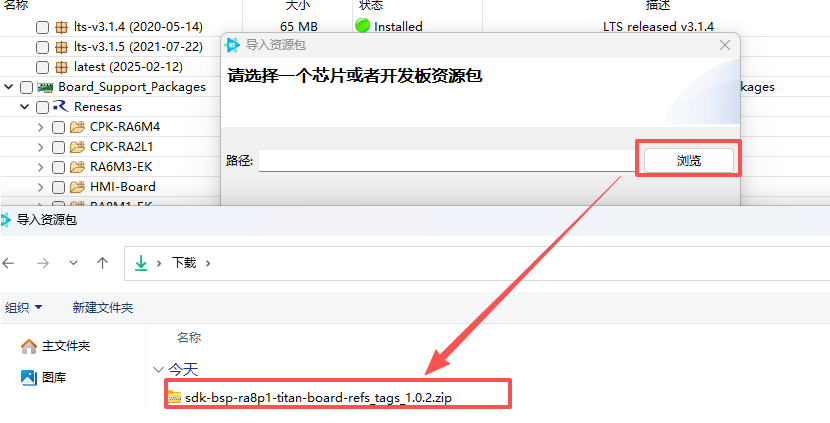
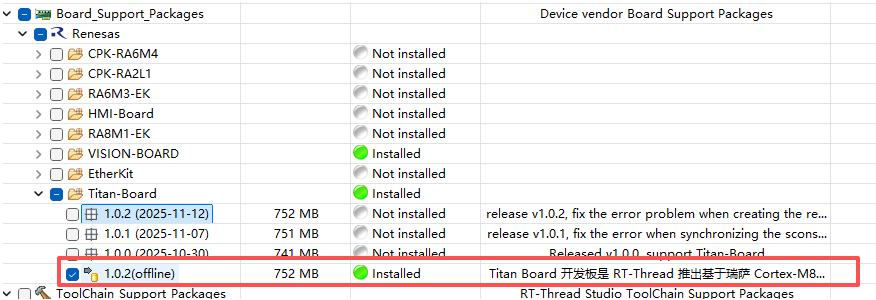
导入成功。
提示:如果在烧录时检测不到 DAP-Link,按下方链接中的步骤操作即可解决。
https://rt-thread-studio.github.io/sdk-bsp-ra8p1-titan-board/latest/faq/FAQ_page/README_zh.html
3.4. Python 环境
参考:https://github.com/AlexeyAB/darknet?tab=readme-ov-file#how-to-compile-on-windows-using-cmake
由于需要安装vs 2022、cmake等工具,下载需要的时间过久,我这边有编译好的darknet.exe,可以使用cpu直接训练模型,如果需要使用gpu训练模型,可以按照darknet官方的安装步骤重新编译。
编译前注意修改配置文件,根据自己的需求修改。
option(CMAKE_VERBOSE_MAKEFILE”Create verbose makefile”ON)option(CUDA_VERBOSE_BUILD”Create verbose CUDA build”OFF)option(BUILD_SHARED_LIBS”Create dark as a shared library”ON)option(BUILD_AS_CPP”Build Darknet using C++ compiler also for C files”OFF)option(BUILD_USELIB_TRACK”Build uselib_track”ON)option(MANUALLY_EXPORT_TRACK_OPTFLOW”Manually export the TRACK_OPTFLOW=1 define”OFF)option(ENABLE_OPENCV”Enable OpenCV integration”OFF)option(ENABLE_CUDA”Enable CUDA support”OFF)option(ENABLE_CUDNN”Enable CUDNN”OFF)option(ENABLE_CUDNN_HALF”Enable CUDNN Half precision”OFF)option(ENABLE_ZED_CAMERA”Enable ZED Camera support”OFF)option(ENABLE_VCPKG_INTEGRATION”Enable VCPKG integration”OFF)
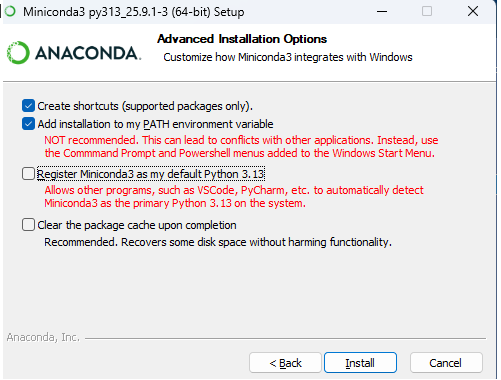
3.5. Conda 安装
双击安装miniconda,注意这一步要选择添加环境变量
3.6. 安装 Python 环境
导入环境,convert用于将darknet模型转为tflite模型并量化。
3.6.1. convert
下面是安装方式,二选一
解压(推荐)
将convert.zip解压到anaconda安装目录的envs中。

安装keras-YOLOv3-model-set环境。
condacreate-nconvertpython=3.8conda activateconvertcd keras-YOLOv3-model-setpip install Cythonpip install-r requirements.txt
3.6.2. ruhmi
安装ruhmi环境, 用于将量化后的tflite模型转为能在开发板上部署的模型。
condacreate -n ruhmi python=3.10condaactivate ruhmicdruhmi-framework-mcupipinstall”install\mera-2.4.0+pkg.179-cp310-cp310-win_amd64.whl”pipinstall onnx==1.17.0tflite==2.18.0
4 训练模型
4.1 收集数据
使用labelimg创建数据集。
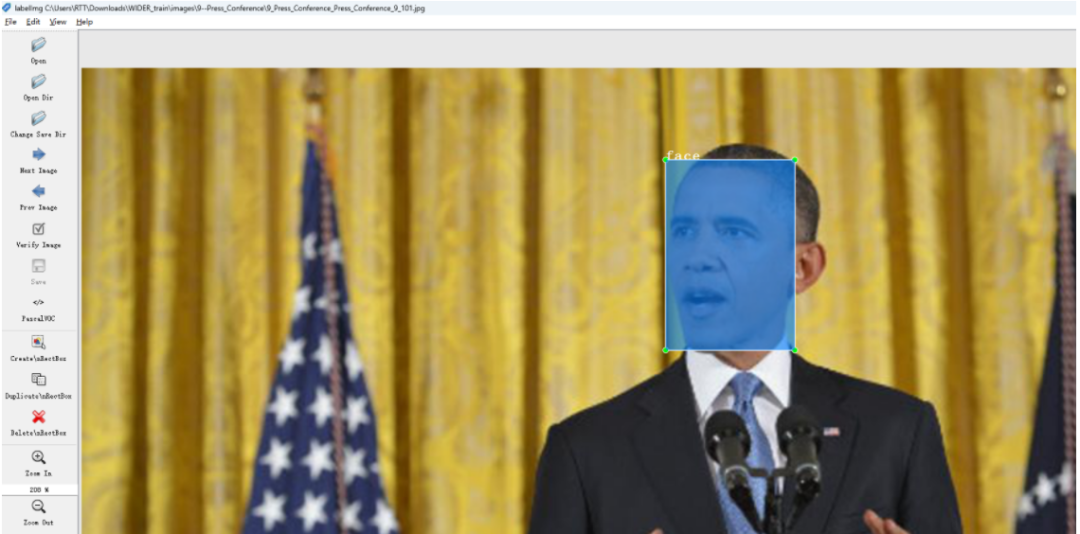
创建好的数据集可以使用Yolo-Fastest\scripts\xml2yolo.py来转为yolo格式。同时会得到会得到train.txt和val.txt的生成路径。
python scripts/xml2yolo.py
修改voc.names。
face
得到anchor。
darknet.exe detector calc_anchors datasets/voc.data -num_of_clusters9-width192-height192
得到的anchor如下,每个人每次生成都不一样。
anchors= 3, 5, 6,10, 11,17, 14,30, 25,25, 25,52, 43,54, 58,90, 94,117
修改yolo-fastest.cfg。
width=192height=192channels=1
# 两个yolo都要改[convolutional]size=1stride=1pad=1filters=18activation=linear[yolo]mask=0,1,2anchors= 3, 5, 6,10, 11,17, 14,30, 25,25, 25,52, 43,54, 58,90, 94,117classes=1我提取收集整理好了人脸识别数据,位于datasets中。
4.2 训练
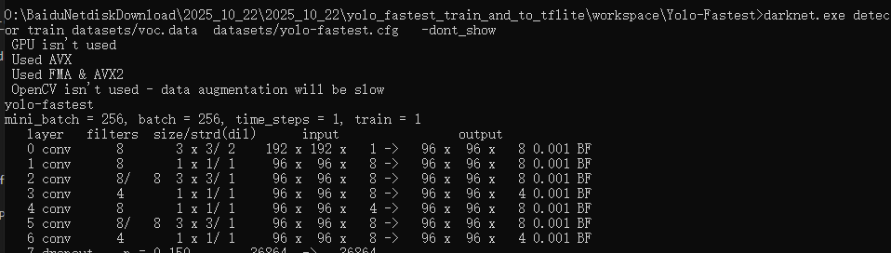
使用我编译好的darknet.exe
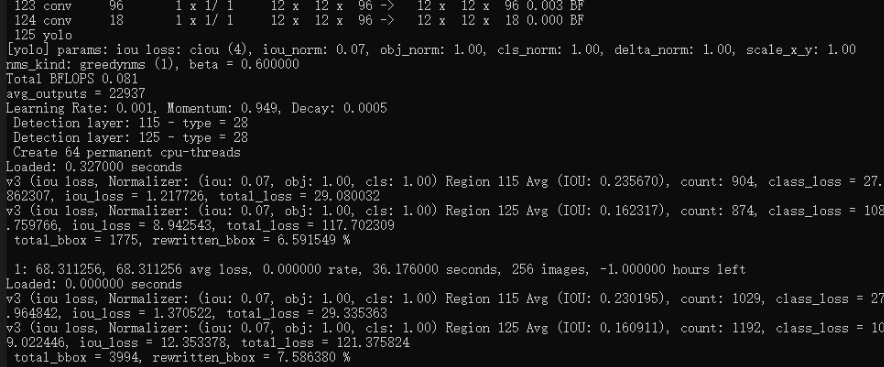
cdYolo-fastestdarknet.exe detector train datasets/voc.data datasets/yolo-fastest.cfg -dont_show
大概训练2小时才会有好一些的模型结果(GPU启动训练的情况下)。
5 AI部署转换
训练模型结束后,会在Yolo-fastest/backup中保存模型权重。我们选择最后一轮的权重,用于转换。
5.1 darknet->tflite
转换代码需要的参数如下。

我们需要复制训练好的权重、cfg文件到keras-YOLOv3-model-set下,然后运行,这里需要稍等一会,需要大概6分钟。
conda activate convertcd /path/to/keras-YOLOv3-model-setpython tools/model_converter/conver2tflite_and_int8.py–config_pathyolo-fastest.cfg–weights_pathyolo-fastest_last.weights–output_pathface.h5–int8_img_path../Yolo-Fastest/datasets/face/data_1/train/image/–save_tflite_pathface_int8.tflite-f
最终会得到face_int8.tflite模型。
5.2 tflite->ruhmi
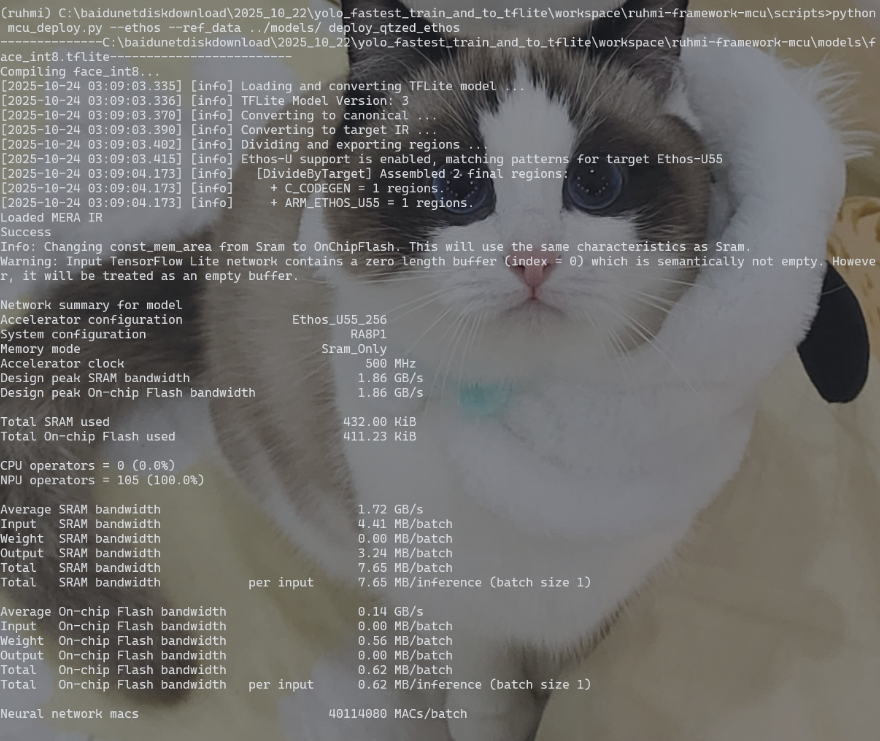
将上⼀步得到的tflite文件复制到ruhmi-framework-mcu/models下,然后运行以下指令
conda activate ruhmicd /path/to/ruhmi-framework-mcu/scriptspython mcu_deploy.py–ethos–ref_data../models/ deploy_qtzed_ethos
6 AI部署模型
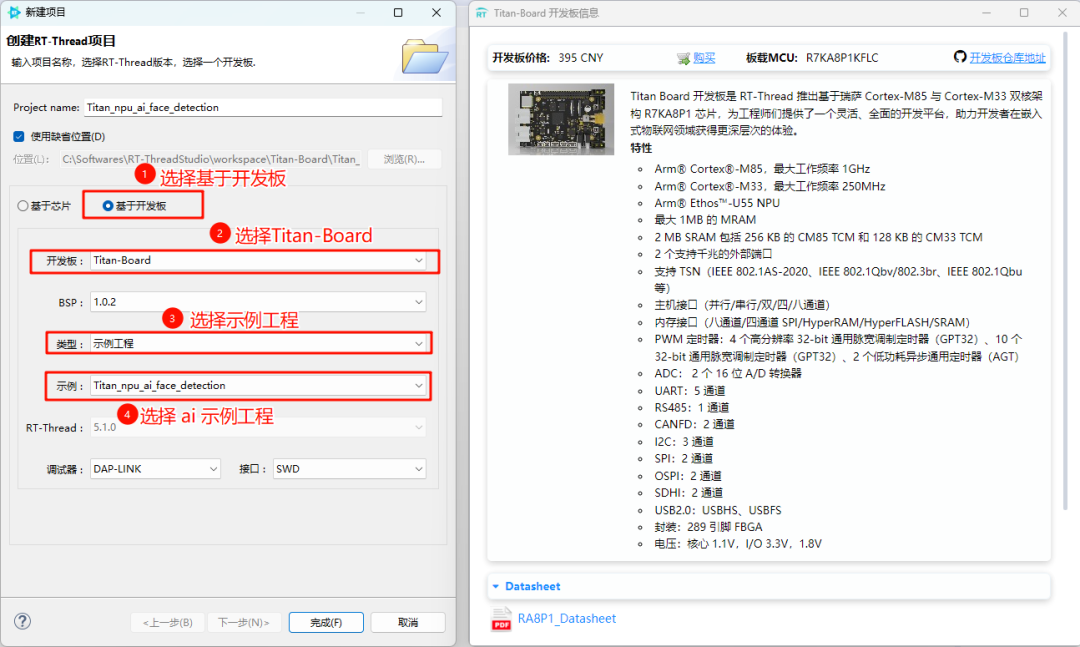
在 RT-Thread Studio 中创建示例工程。
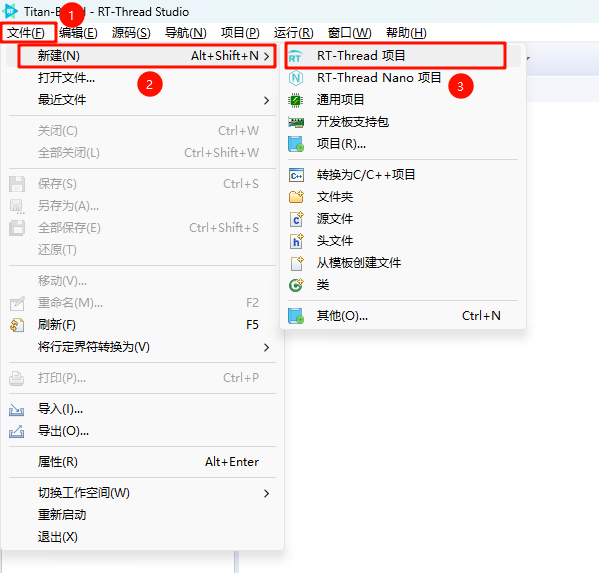
创建 ai 示例工程。
tflite->ruhmi会在ruhmi-framework-mcu/scripts下生成可部署模型⽂件,路径如下
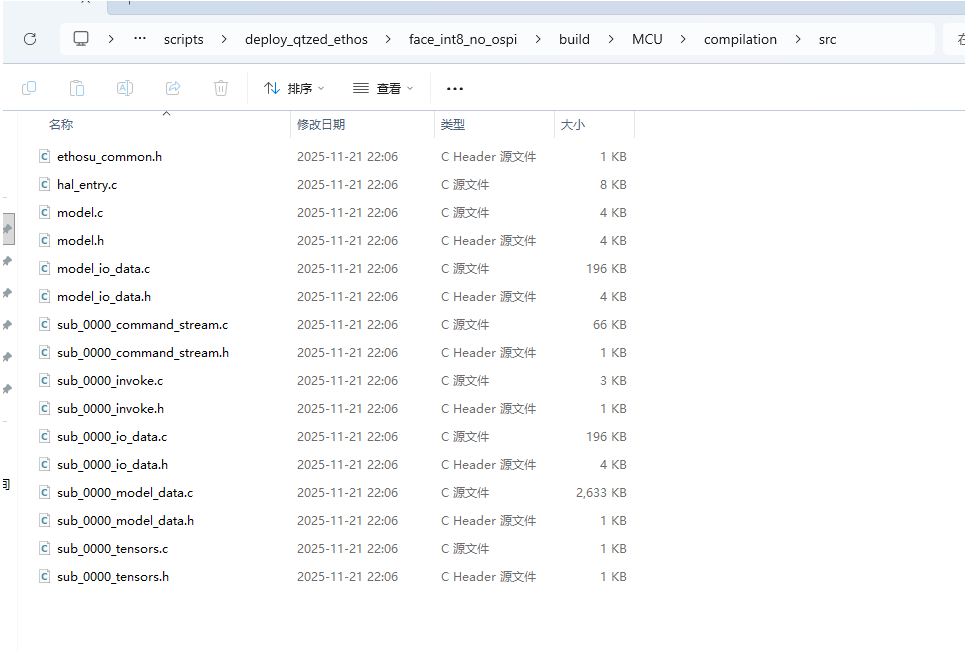
接下来,删除*_io_data.*和hal_entry.c,然后将剩下的文件拷贝到刚刚创建的示例工程的Titan_npu_ai_face_detection/src/models下。
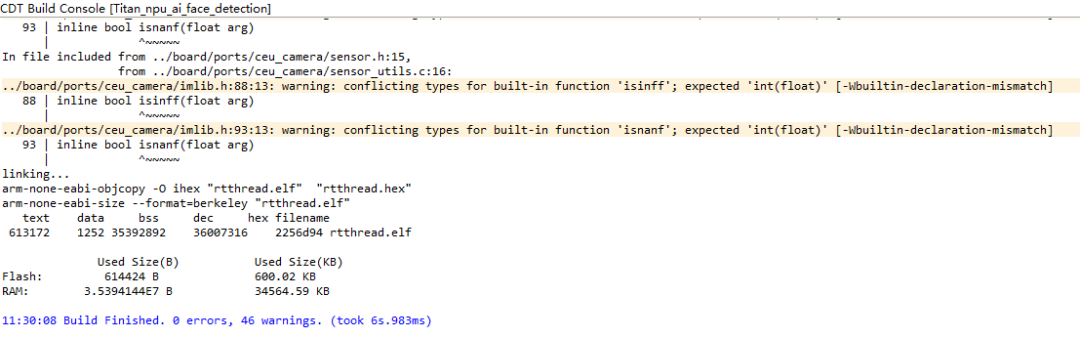
编译然后下载。

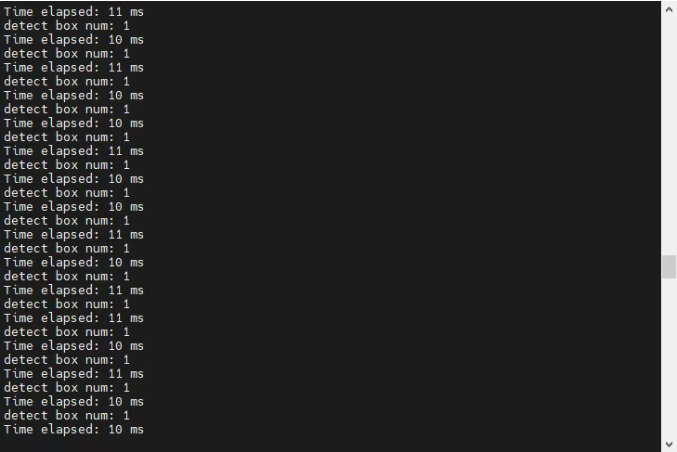
检测效果如下
7 网盘资源及培训视频
网盘资源链接:https://pan.baidu.com/s/16OwyiITyhET6k-BtPnJokw?pwd=d983
培训视频链接:
https://www.bilibili.com/video/BV1nsUSBFE8U/?spm_id_from=333.1387.collection.video_card.click








